Как найти конкретные точки / координаты в кратчайшем пути?
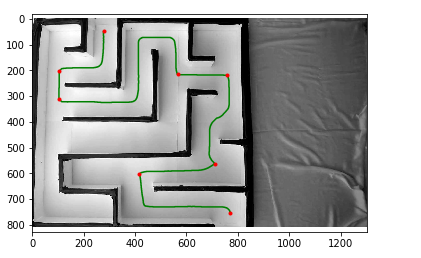
Я использую NetworkX, NumPy и sknw модуль Найти shortest_path лабиринта. Алгоритм кратчайшего пути дает то, что я хочу, и я могу нарисовать путь с узлами. Однако есть и другие точки, которые я хочу найти на этом пути, но они не являются узлами в самом коротком пути. Вот кратчайший путь, указанный только что найденными узлами:
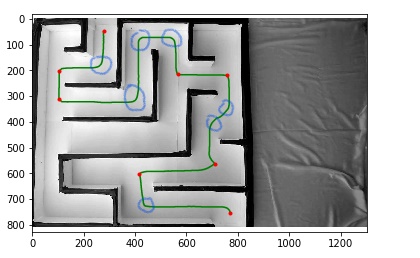
Вот то, что мне нужно:
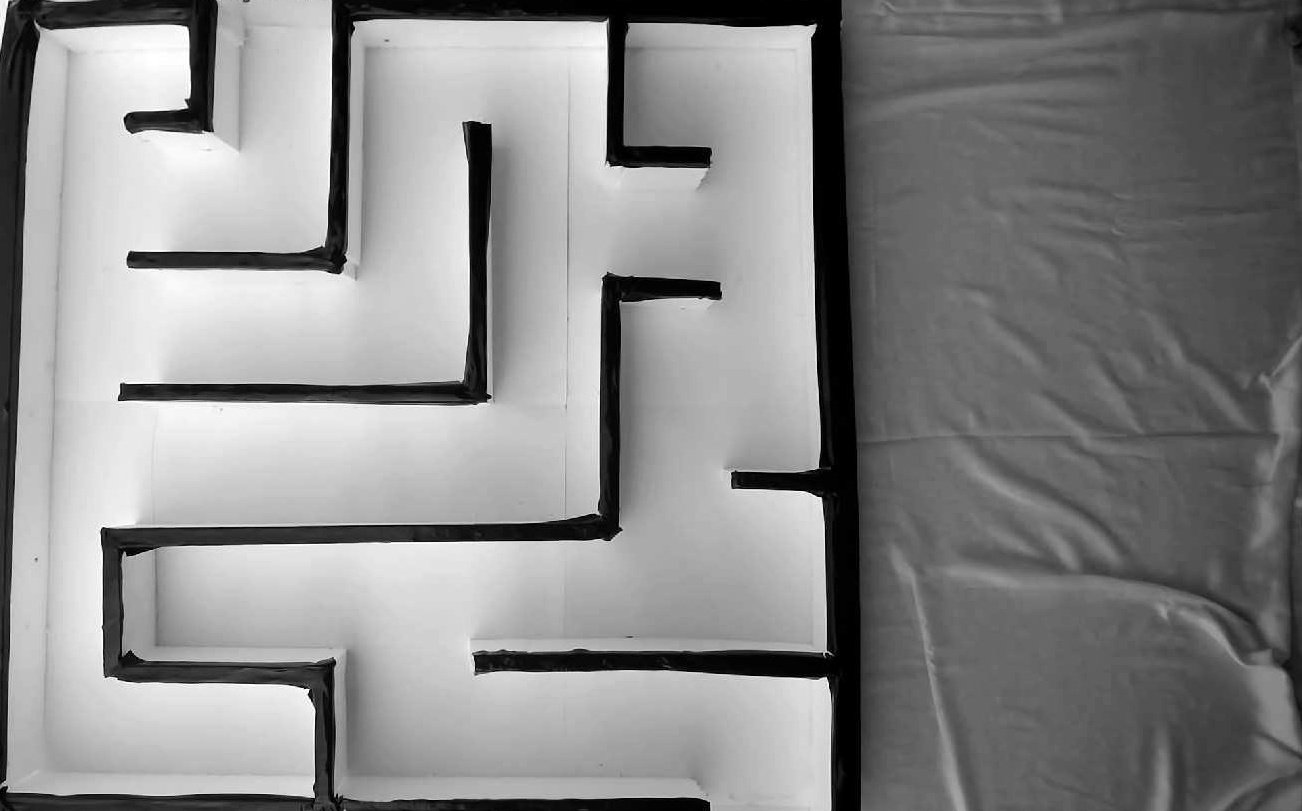
Вот оригинал изображение:
В чем заключается способ нахождения этих точек и нарисовать их как красные узлы на изображении ? Вот код (отредактирован):
#Skeletonize the Thresholded Image
skel = skeletonize(threshold2)
#Build Graph from skeleton
graph = sknw.build_sknw(skel, multi=False)
G = nx.Graph(graph)
#Find the shortest path
path = nx.shortest_path(G,source=0,target=len(G)-1)
path_edges = zip(path,path[1:])
plt.imshow(img, cmap='gray')
def nodes_edges(G,n):
for (s,e) in path_edges:
ps = graph[s][e]['pts']
plt.plot(ps[:,1], ps[:,0], 'green')
# Find the "corner points" and plot:
tolerance = 30
simple_polyline = approximate_polygon(ps, tolerance)
plt.plot(simple_polyline[1:-1, 1], simple_polyline[1:-1, 0], '.m')
node = G.node
ps = np.array([node[i]['o'] for i in path])
plt.plot(ps[:,1], ps[:,0], 'r.')
plt.axis('equal')
plt.show()
print(ps)
print('Number of Element = ',len(ps))
print('Number of Step = ',
nx.shortest_path_length(G,source=0,target=len(G)-1))
print('Path Edges = ', path_edges)
print('Shortest Path = ', path)
return(n)
nodes_edges(graph,skel)
Edit: вот выходные данные, которые обеспечивают поворотные точки и узлы отдельно

1 ответ:
"Угловые" точки, которые вы хотите найти, не определяются как "пересечение", используемое для построения графика. Поэтому их нельзя найти с помощью одного и того же метода.
В зависимости от того, каково ваше фактическое определение для этих точек, метод может заключаться в упрощении пути с помощью алгоритма Дугласа-Пекера, используя
approximate_polygonвskimage(смотрите демонстрацию здесь ). Для этого необходимо выбрать параметр допуска.Из примера , приведенного в
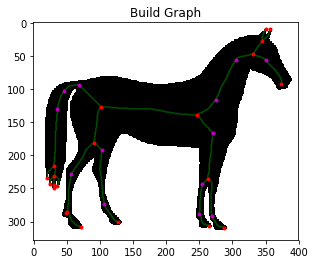
sknwreadme, я пытался воссоздать ваш:import numpy as np import matplotlib.pylab as plt from skimage.morphology import skeletonize from skimage import data import sknw import networkx as nx from skimage.measure import approximate_polygon # open and skeletonize img = data.horse() ske = skeletonize(~img).astype(np.uint16) # build graph from skeleton graph = sknw.build_sknw(ske) # draw image plt.imshow(img, cmap='gray') # draw edges by pts for (s,e) in graph.edges(): polyline = graph[s][e]['pts'] plt.plot(polyline[:,1], polyline[:,0], 'green', alpha=.6) # Find the "corner points" and plot: tolerance = 5 simple_polyline = approximate_polygon(polyline, tolerance) plt.plot(simple_polyline[1:-1, 1], simple_polyline[1:-1, 0], '.m') # draw node by o node, nodes = graph.node, graph.nodes() ps = np.array([node[i]['o'] for i in nodes]) plt.plot(ps[:,1], ps[:,0], 'r.') # title and show plt.title('Build Graph') plt.show()Что дает: (пурпурные точки являются "угловыми" точками)
Я думаю, что это будет работать гораздо лучше на изображении лабиринта.
Edit, пример кода для итерации по пути:
one_path = nx.shortest_path(graph, source=0, target=8) full_line = [] for source, target in zip(one_path, one_path[1:]): polyline = graph[source][target]['pts'] # Find the "corner point": tolerance = 5 simple_polyline = approximate_polygon(polyline, tolerance) full_line.extend(simple_polyline[:-1]) full_line.append(simple_polyline[-1]) # add the last point full_line = np.array(full_line) # convert to an array
Comments